Education

School Projects
Vertical Wind Turbine
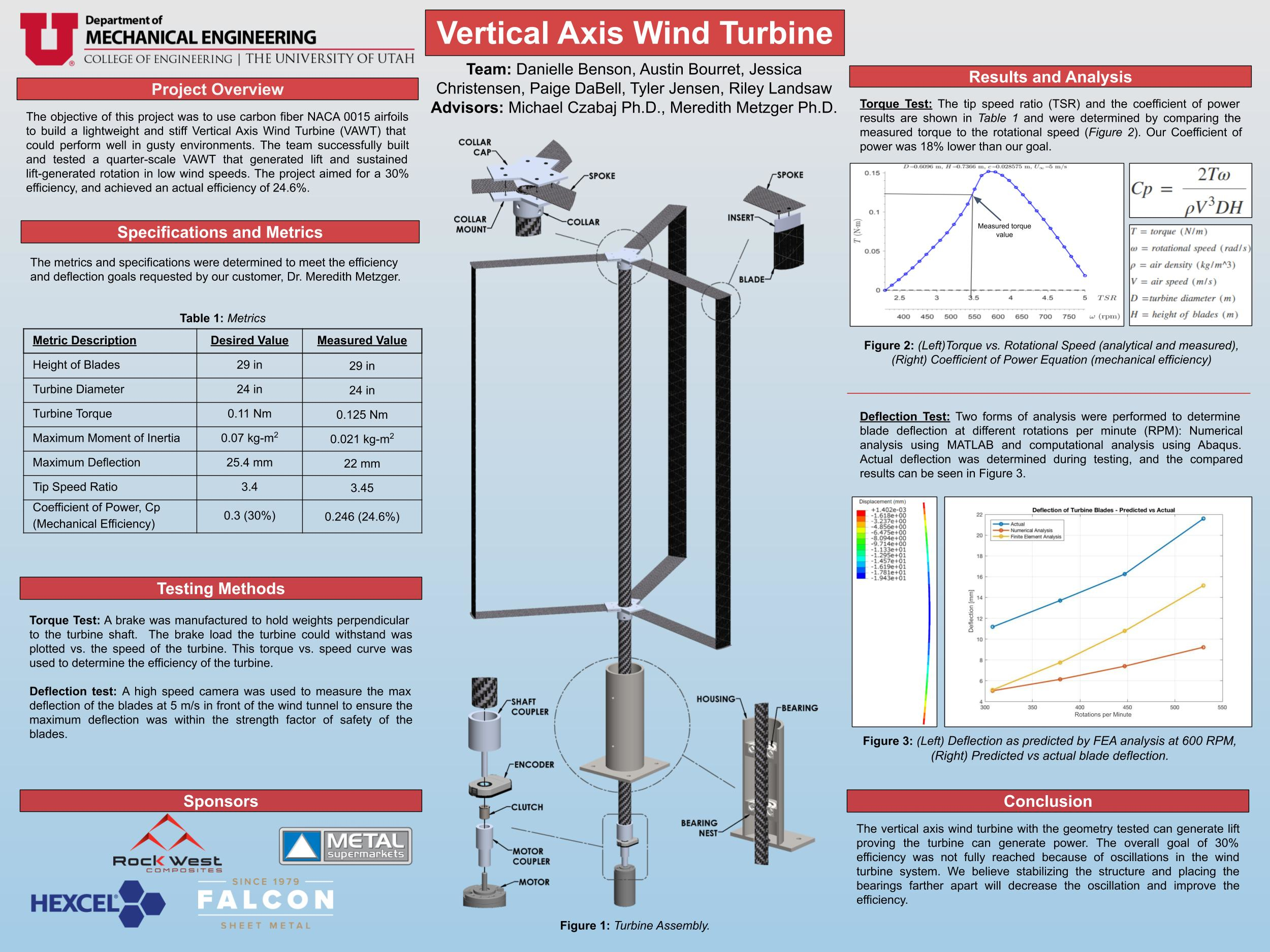

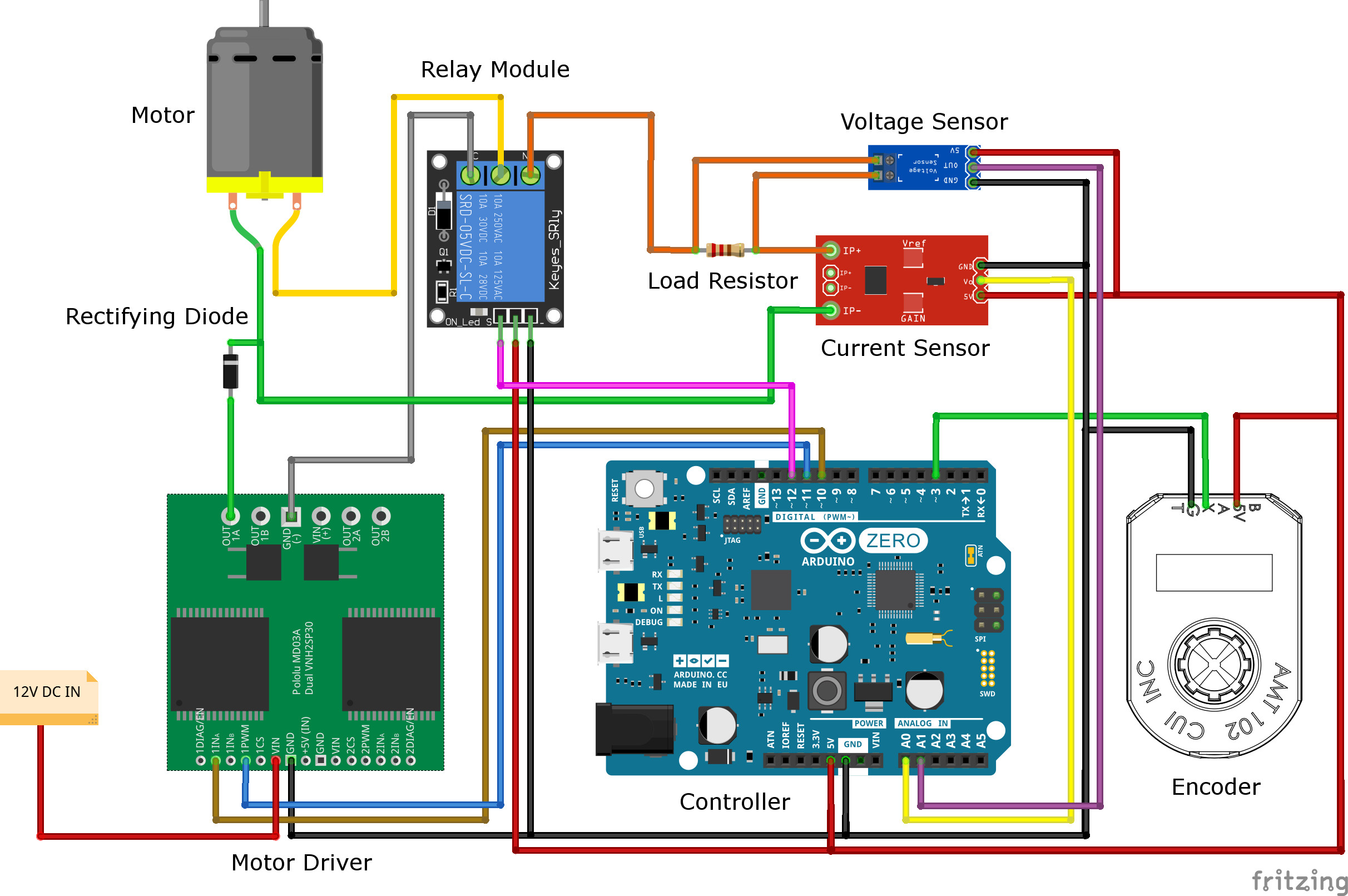
My senior design team designed and manufactured a vertical axis wind turbine to validate a blade design at 1/3 scale. The project advisor was Professor M. Metzger, Ph.D. who assisted us over the Spring 2018 and Fall 2018 semesters. We designed and fabricated the carbon fiber turbine blades as well as designed and built some basic startup electornics that allowed the turbine to start to spin up to speed when the wind was strong enough. We used 3D printing for rapid protoryping of the lower assembly before machining some of the final components.
Autonomous Obstacle Course Robot
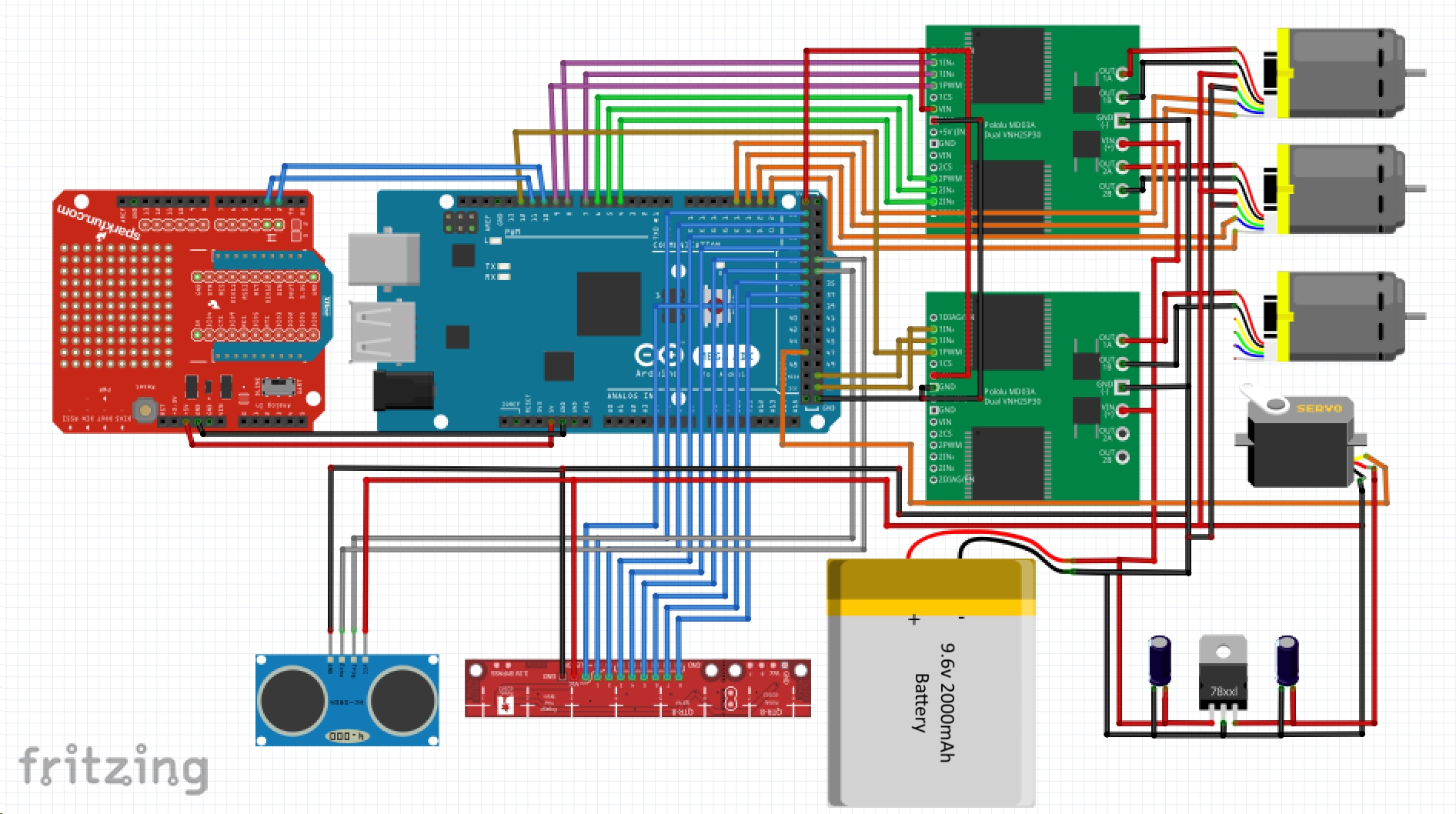
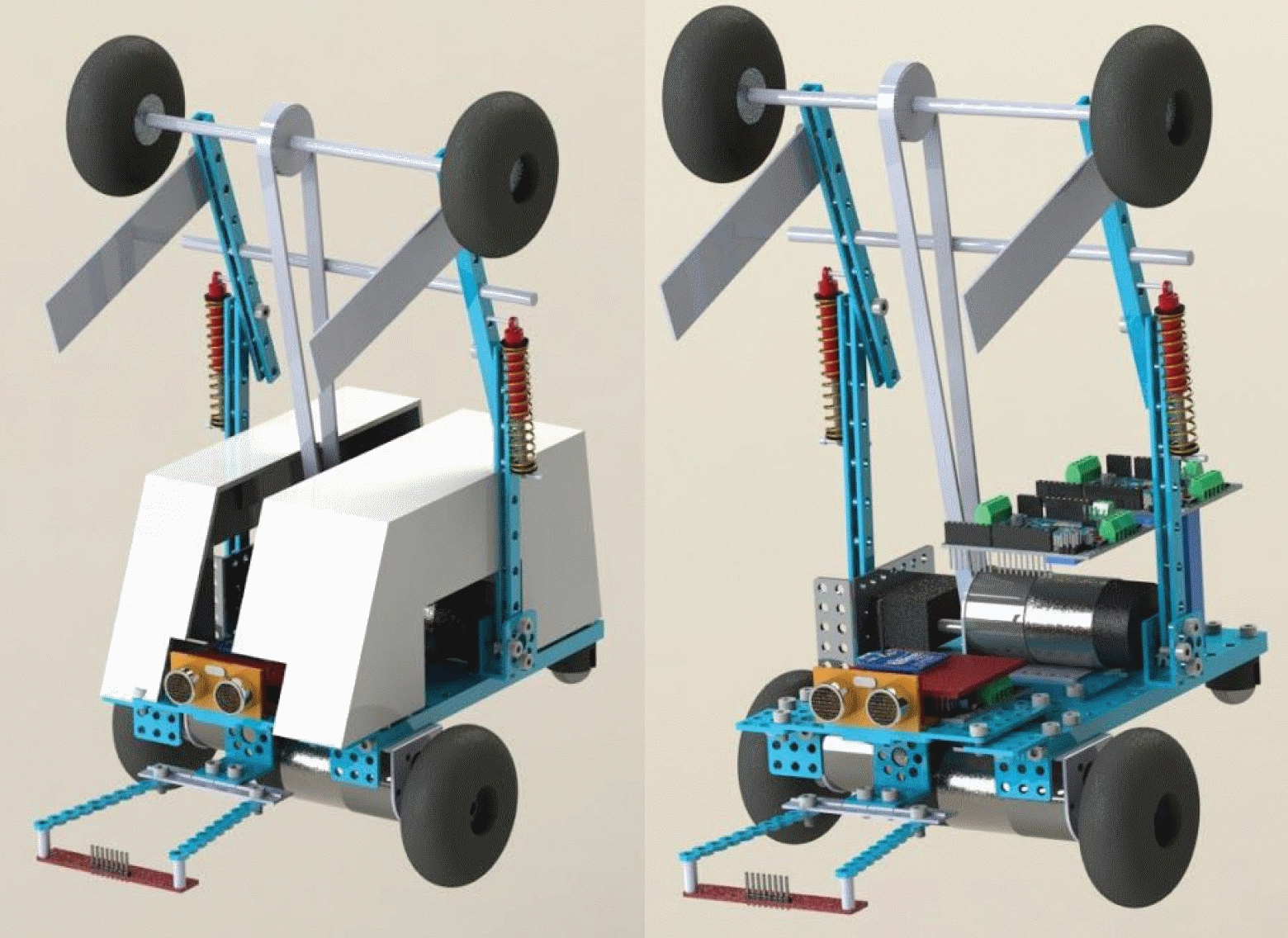
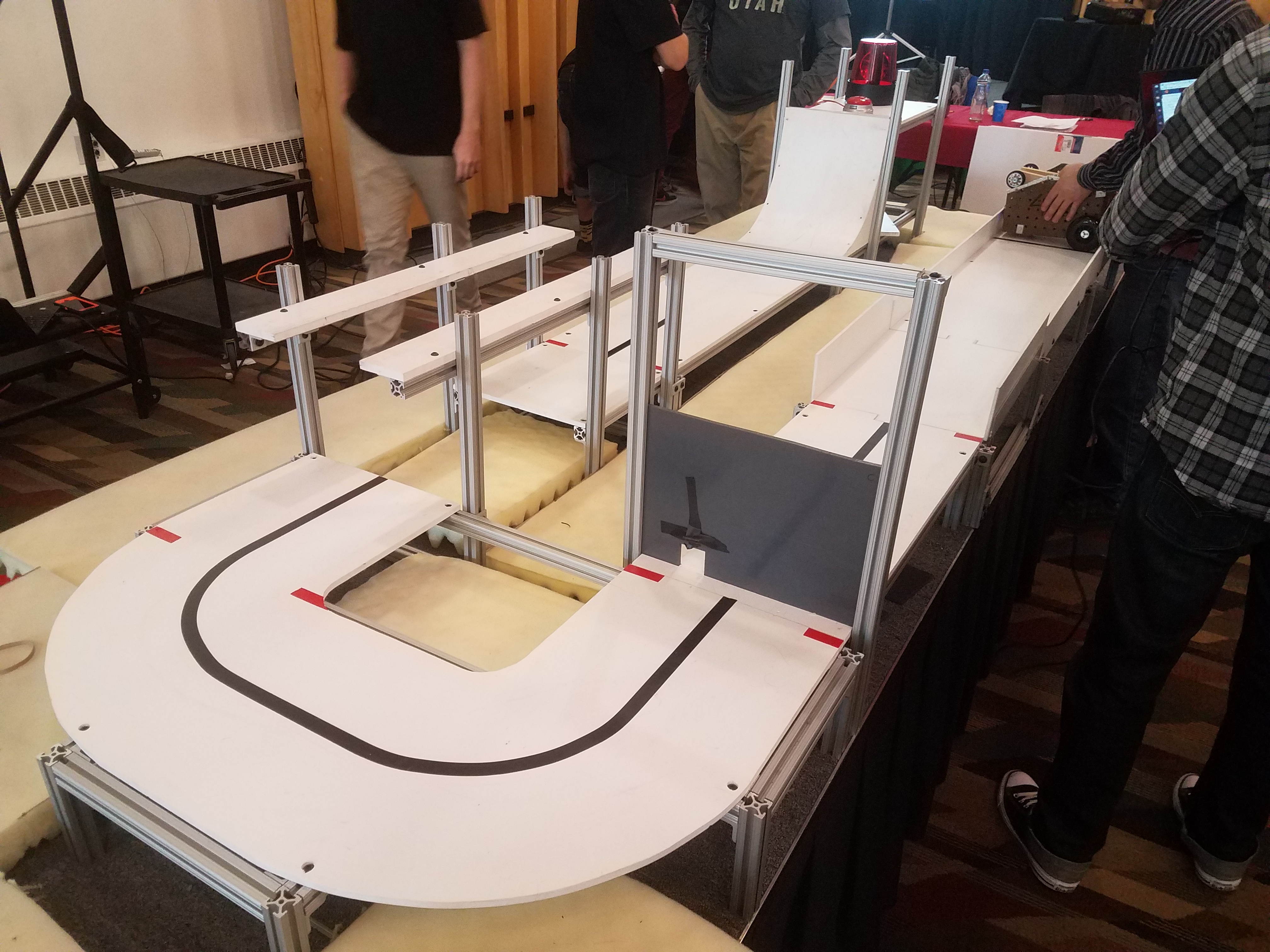
This project was for the University of Utah Junior Mechatronics Competition. We placed second overall, completing 3 of the 5 obstacles in one attempt without stops or resets. The goal was to build a robot that could complete an obstacle course autonomously. The obstacles included a paddle board, wall lift, line following u-turn, rails over a gap, and a vertical wall with a button at the top. The robot had to be controlled (starting, stopping, testing) wirelessly using an Arduino Uno and an Arduino Mega with xBee wireless radio modules.
Our design focused on completing the first four obstacles. We used Position-Derivative (PD) control to drive our robot in a straight line accross the paddle board. The robot then would lift the wall using the wheels at the end of the arms and drive under. We used a collection of IR sensors placed off the front of the robot and PD control to line follow around the u-turn. The wheels that lifted the wall were then moved upward to traverse the rails.
We used an arduino I designed and assembled all of the electrical, wrote all of the test programs, and helped model the final assembly. I also 3D printed the cover for the robot. The design used two 1:100 gear ration drive motors, a servo to control the arm position and a third motor to lift the wall and move across the rails.
University of Utah Formula SAE Electric Car


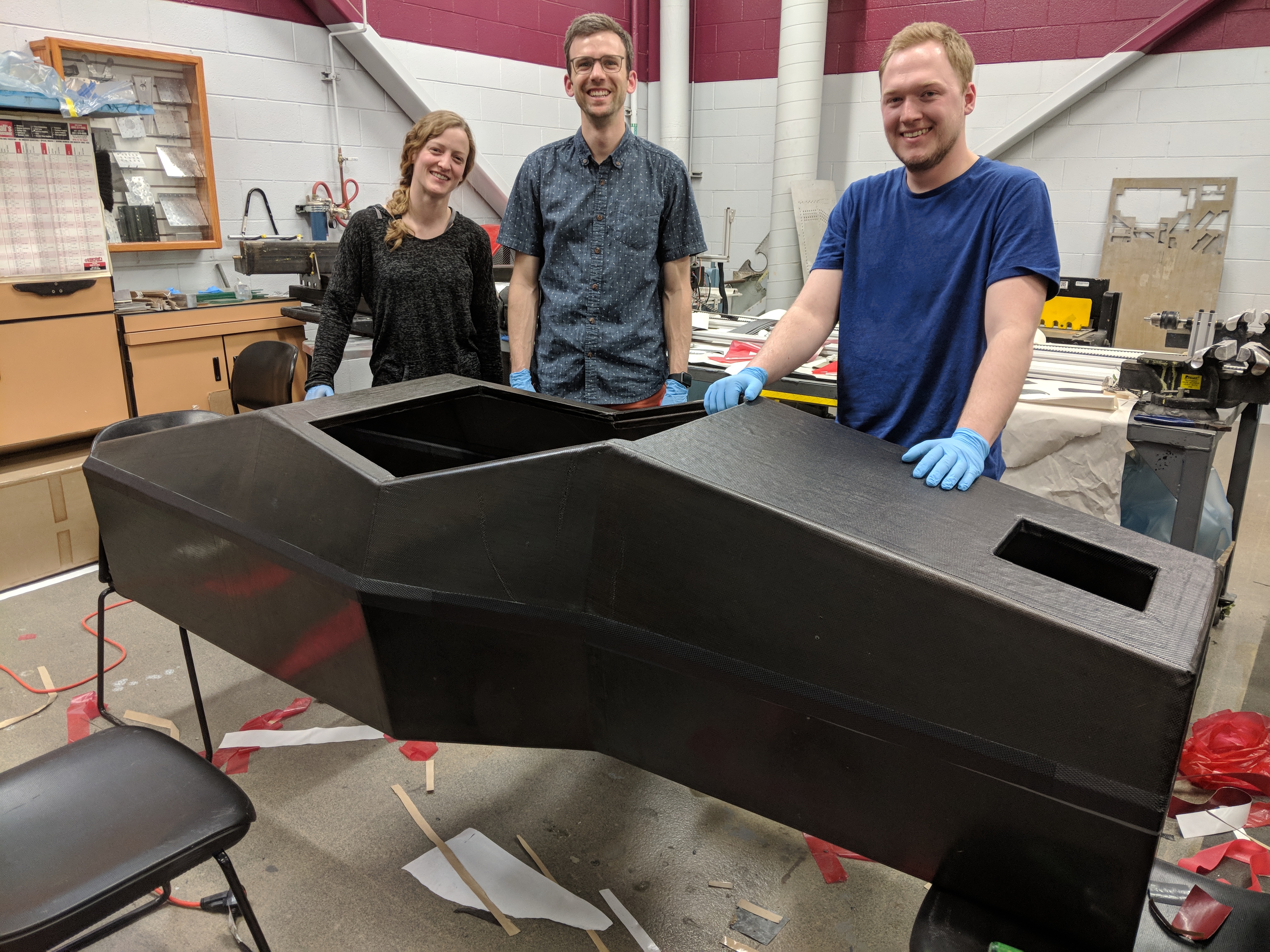
I worked with the 2018 FSAE team assisting with the carbon fiber lay-up, cure and finish of the chassis. I also did design work on the front roll hoop and mounting brackets using SolidWorks as well as some 3D printing for prototyping before fabrication. I previously volunteered to work with the 2017 FSAE Senior Design project from June 2016 to January 2017. I worked with the suspension design team to develop mathematical models in MATLAB to predict our cambre angle, roll center height, and general geometric clearances. I also worked on some intial barebones suspension models in SOLIDOWRKS to help the other teams design reasonable mounting locations and check frame clearances.